Boot RZ/V2L Evaluation Board Kit
This page describes how to boot the RZV2L Evaluation Board Kit (RZV2L EVK).
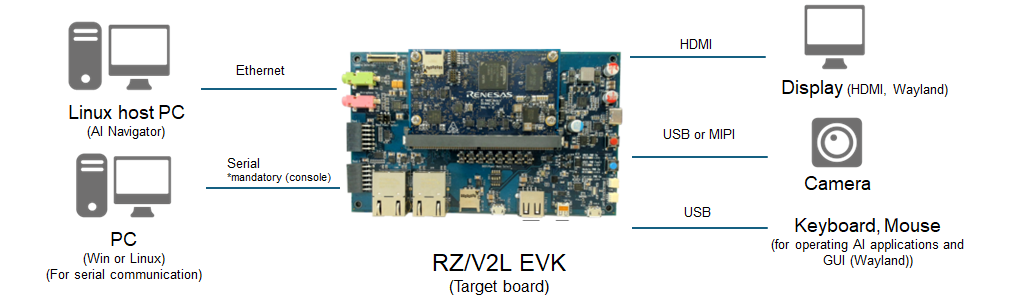
Connection
This figure shows the connection to develop your AI application using AI Navigator.
Target Board
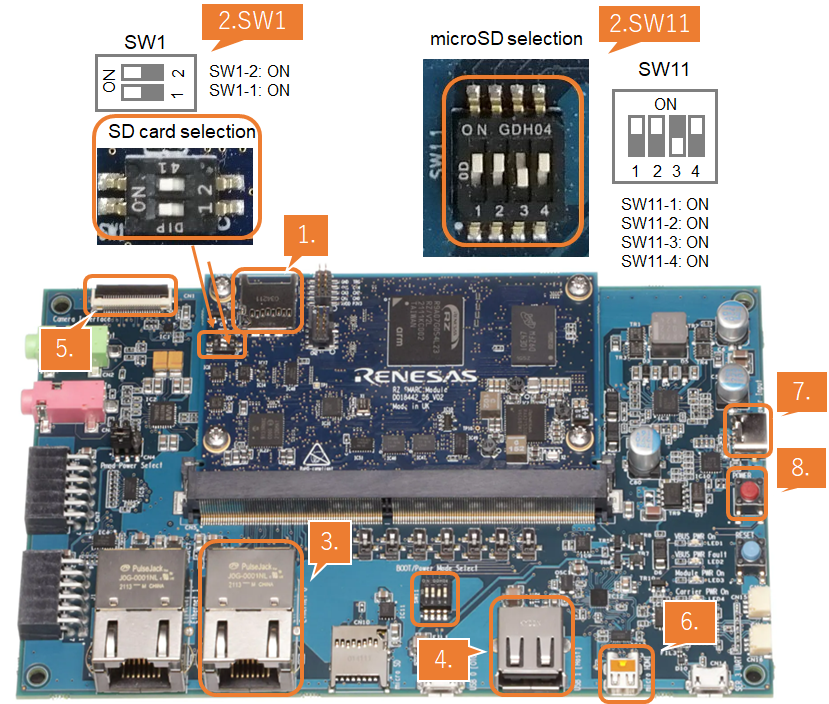
Board Configuration (Hardware Setup)
These figures show the board layout, including switches, slots, and connectors.
Boot Steps
-
Insert the microSD card to the Board.
Note Use the microSD card slot CN3 on the Board as shown in the figure.
- Change SW1 and SW11 settings as shown in the figure to boot the board from the microSD card..
- Connect an Ethernet cable between the board and Linux PC.
- Connect the USB mouse and USB keyboard via USB hub.
- Connect the Google Coral camera to the Board.
- Connect the HDMI monitor to the Board.
- Connect the power cable to the Board.
- Press power button for 1 second to turn on the board.
- After the boot-up, following screen will be displayed on HDMI monitor.
- Click the icon at the top-left corner to open the terminal.
- To communicate between the Linux host PC and the target board via Ethernet, configure the IP addresses on both sides so that they are on the same network.
- Linux Host PC:
Configure the Ethernet interface on the host PC and assign an appropriate IP address (for example, 192.168.1.10). -
Target board:
Configure the Ethernet interface on the target board and assign an IP address in the same subnet (for example, 192.168.1.11).
Note When using AI Navigator, the target board IP address is set to 192.168.1.11 by default. - Linux Host PC:
- Right-click the target e² studio project and select "Debug As" > "Debug Configurations...".
- In the debug configuration window, select the target project under "Target Communication Framework" and confirm that the connection to the target board is correctly registered.