8.3 メッセージ・バッファ
マルチタスク処理では,あるタスクの処理結果を他タスクに通知するといったタスク間の通信機能(メッセージの受け渡し機能)が必要となります。そこで,RI600PXでは,任意のサイズのメッセージをコピーして受け渡す機能として“メッセージ・バッファ”を提供しています。
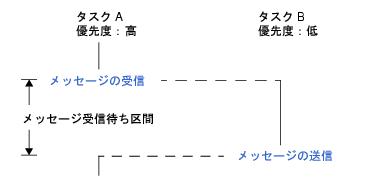
以下に,メッセージ・バッファを利用した場合の処理の流れを示します。
メッセージ・バッファは,以下のいずれかの方法で生成します。
2 )
cre_mbfまたは
acre_mbfサービスコールによる生成
cre_mbfは,パラメータ
pk_cmbfが指す領域に設定されたメッセージ・バッファ生成情報にしたがって,パラメータ
mbfidで指定されたメッセージ・バッファIDのメッセージ・バッファを生成します。
acre_mbfは,パラメータ
pk_cmbfが指す領域に設定されたメッセージ・バッファ生成情報にしたがってメッセージ・バッファを生成し,生成されたメッセージ・バッファIDを返します。
指定するメッセージ・バッファ生成情報は,以下の通りです。
- メッセージ・バッファ属性(
mbfatr)
「送信タスク待ちキューはFIFO順(TA_TFIFO)」のみを指定できます。
なお,受信タスク待ちキューはもFIFO順で管理されます。
- メッセージの最大サイズ(バイト数)(
maxmsz)
- メッセージ・バッファ領域のサイズ(バイト数)(
mbfsz),メッセージ・バッファ領域の先頭アドレス(
mbf)
メッセージ・バッファ領域は,メモリ・オブジェクト以外でかつユーザ・スタック以外の領域に作成してください。
以下に,代表としてacre_mbfの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#define MAX_MSGSZ 64 /*メッセージの最大サイズ(バイト数)*/
#define MBFSZ 256 /*メッセージ・バッファ領域のサイズ(バイト数)*/
#pragma section B BRI_RAM /*メッセージ・バッファ領域のセクション*/
static UW mbf_area[ MBFSZ/sizeof(UW)]; /* メッセージ・バッファ領域*/
#pragma section
#pragma task Task1 /*備考参照*/
void Task1 ( VP_INT exinf ); /*備考参照*/
void Task1 ( VP_INT exinf )
{
ID mbfid; /*変数の宣言*/
T_CMBF pk_cmbf = { /*変数の宣言,初期化*/
TA_TFIFO, /*メッセージ・バッファ属性(mbfatr)*/
MAX_MSGSZ, /*メッセージの最大サイズ(バイト数)(maxmsz)*/
MBFSZ, /*メッセージ・バッファ領域のサイズ(バイト数)(mbfsz)*/
(VP)mbf_area /*メッセージ・バッファ領域の先頭アドレス(mbf)*/
};
............
mbfid = acre_mbf ( &pk_cmbf ); /*メッセージ・バッファ生成*/
............
}
|
備考 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考参照*/
void Task1 ( VP_INT exinf ); /*備考参照*/
void Task1 ( VP_INT exinf )
{
ID mbfid = 8; /*変数の宣言,初期化*/
............
............
del_mbf( mbfid ); /*メッセージ・バッファの削除*/
}
|
備考 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
メッセージの送信は,以下に示したサービス・コールを処理プログラムから発行することにより実現されます。
-
snd_mbf(待つ)
パラメータ
mbfidで指定されたメッセージ・バッファの状況に応じて,以下の処理を行います。
- 受信待ちキューにタスクがキューイングされている場合
msgで指定されたメッセージを受信待ちキュー先頭のタスクに渡します,これにより,該当タスクは受信待ちキューから外れ,WAITING状態(メッセージ受信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
- 受信待ちキューおよび送信待ちキューにタスクがキューイングされておらず,メッセージ・バッファにメッセージを格納するための空き領域がある場合
msgで指定されたメッセージをメッセージ・バッファに格納します。このとき,対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ減少します。
- 受信待ちキューおよび送信待ちキューにタスクがキューイングされておらず,メッセージ・バッファにメッセージを格納するための空き領域がない場合,または送信待ちキューにタスクがキューイングされている場合
自タスクを対象メッセージ・バッファの送信待ちキューにキューイングしたのち,RUNNING状態からWAITING状態(メッセージ送信待ち状態)へと遷移させます。
なお,メッセージ送信待ち状態の解除は,以下の場合に行われます。
|
|
|
rcv_mbfの発行により,対象メッセージ・バッファに空き領域が確保された。
|
|
|
|
|
|
|
|
送信待ちキュー先頭のタスクが,以下のいずれかによって待ち状態を強制的に解除された。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考3参照*/
void Task1 ( VP_INT exinf ); /*備考3参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mbfid = 1; /*変数の宣言,初期化*/
B msg[] = {1,2,3}; /*変数の宣言,初期化*/
UINT msgsz = sizeof( msg ); /*変数の宣言,初期化*/
............
............
/*メッセージの送信*/
ercd = snd_mbf ( mbfid, (VP)msg, msgsz );
if ( ercd == E_OK ) {
............ /*正常終了処理*/
............
} else if ( ercd == E_RLWAI ) {
............ /*強制終了処理*/
............
}
............
............
}
|
備考1 メッセージを対象メッセージ・バッファに書き込む際の書き込み方法は,メッセージの送信要求を行った順に行われます。
備考2 自タスクを対象メッセージ・バッファの送信待ちキューにキューイングする際のキューイング方式は,FIFO順に行われます。
備考3 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
- 受信待ちキューにタスクがキューイングされている場合
msgで指定されたメッセージを受信待ちキュー先頭のタスクに渡します,これにより,該当タスクは受信待ちキューから外れ,WAITING状態(メッセージ受信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
- 受信待ちキューおよび送信待ちキューにタスクがキューイングされておらず,メッセージ・バッファにメッセージを格納するための空き領域がある場合
msgで指定されたメッセージをメッセージ・バッファに格納します。このとき,対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ減少します。
- 受信待ちキューおよび送信待ちキューにタスクがキューイングされておらず,メッセージ・バッファにメッセージを格納するための空き領域がない場合,または送信待ちキューにタスクがキューイングされている場合
戻り値としてE_TMOUTを返します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考2参照*/
void Task1 ( VP_INT exinf ); /*備考2参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mbfid = 1; /*変数の宣言,初期化*/
B msg[] = {1,2,3}; /*変数の宣言,初期化*/
UINT msgsz = sizeof( msg ); /*変数の宣言,初期化*/
............
............
/*メッセージの送信*/
ercd = psnd_mbf ( mbfid, (VP)msg, msgsz );
if ( ercd == E_OK ) {
............ /*ポーリング成功処理*/
............
} else if ( ercd == E_TMOUT ) {
............ /*ポーリング失敗処理*/
............
}
............
............
}
|
備考1 メッセージを対象メッセージ・バッファに書き込む際の書き込み方法は,メッセージの送信要求を行った順に行われます。
備考2 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
-
tsnd_mbf(タイムアウト付きで待つ)
パラメータ
mbfidで指定されたメッセージ・バッファの状況に応じて,以下の処理を行います。
- 受信待ちキューにタスクがキューイングされている場合
msgで指定されたメッセージを受信待ちキュー先頭のタスクに渡します,これにより,該当タスクは受信待ちキューから外れ,WAITING状態(メッセージ受信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
- 受信待ちキューおよび送信待ちキューにタスクがキューイングされておらず,メッセージ・バッファにメッセージを格納するための空き領域がある場合
msgで指定されたメッセージをメッセージ・バッファに格納します。このとき,対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ減少します。
- 受信待ちキューおよび送信待ちキューにタスクがキューイングされておらず,メッセージ・バッファにメッセージを格納するための空き領域がない場合,または送信待ちキューにタスクがキューイングされている場合
自タスクを対象メッセージ・バッファの送信待ちキューにキューイングしたのち,RUNNING状態からタイムアウト付きのWAIITING状態(メッセージ送信待ち状態)へと遷移させます。
なお,メッセージ送信待ち状態の解除は,以下の場合に行われます。
|
|
|
rcv_mbfの発行により,対象メッセージ・バッファに空き領域が確保された。
|
|
|
|
|
|
|
|
送信待ちキュー先頭のタスクが,以下のいずれかによって待ち状態を強制的に解除された。
|
|
|
|
|
|
|
|
|
|
|
パラメータ tmoutで指定された待ち時間が経過した。
|
|
|
|
|
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考4参照*/
void Task1 ( VP_INT exinf ); /*備考4参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mbfid = 1; /*変数の宣言,初期化*/
B msg[] = {1,2,3}; /*変数の宣言,初期化*/
UINT msgsz = sizeof( msg ); /*変数の宣言,初期化*/
TMO tmout = 3600; /*変数の宣言,初期化*/
............
............
/*メッセージの送信*/
ercd = tsnd_mbf ( mbfid, (VP)msg, msgsz, tmout );
if ( ercd == E_OK ) {
............ /*正常終了処理*/
............
} else if ( ercd == E_RLWAI ) {
............ /*強制終了処理*/
............
} else if ( ercd == E_TMOUT ) {
............ /*タイムアウト処理*/
............
}
............
............
}
|
備考1 メッセージを対象メッセージ・バッファに書き込む際の書き込み方法は,メッセージの送信要求を行った順に行われます。
備考2 自タスクを対象メッセージ・バッファの送信待ちキューにキューイングする際のキューイング方式は,FIFO順に行われます。
備考4 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
メッセージの受信は,以下に示したサービス・コールを処理プログラムから発行することにより実現されます。
-
rcv_mbf(待つ)
パラメータ
mbfidで指定されたメッセージ・バッファの状況に応じて,以下の処理を行います。
- メッセージ・バッファにメッセージが格納されている場合
メッセージ・バッファから最古のメッセージを取り出して
msgで指定された領域に格納し,そのメッセージサイズを戻り値として返します。このとき,対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ増加します。
さらに以下を,送信待ちキューにタスクがなくなるか,メッセージを格納できなくなるまで繰り返します。
- 送信待ちキューにタスクがキューイングされており,キュー先頭のタスクが指定したメッセージのサイズだけの空き領域がある場合は,そのメッセージをメッセージ・バッファに格納します。これにより,該当タスクは,送信待ちキューから外れ,WAITING状態(メッセージ送信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。また,このとき対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ減少します。
- メッセージ・バッファにメッセージが格納されておらず,送信待ちキューにタスクがキューイングされている場合
送信待ちキュー先頭のタスクが指定したメッセージを
msgで指定された領域に格納し,そのメッセージサイズを戻り値として返します。これにより,該当タスクは,送信待ちキューから外れ,WAITING状態(メッセージ送信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
なお,この状況は,メッセージ・バッファのサイズが0の場合のみ生じます。
- メッセージ・バッファにメッセージが格納されておらず,送信待ちキューにタスクがキューイングされていない場合
自タスクを対象メッセージ・バッファの受信待ちキューにキューイングしたのち,RUNNING状態からWAITING状態(メッセージ受信待ち状態)へと遷移させます。
なお,メッセージ受信待ち状態の解除は,以下の場合に行われます。
|
|
|
snd_mbfの発行により,対象メッセージ・バッファにメッセージが送信された。
|
|
psnd_mbfの発行により,対象メッセージ・バッファにメッセージが送信された。
|
|
|
|
|
tsnd_mbfの発行により,対象メッセージ・バッファバッファにメッセージが送信された。
|
|
|
|
|
|
|
|
|
|
|
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考3参照*/
void Task1 ( VP_INT exinf ); /*備考3参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mbfid = 1; /*変数の宣言,初期化*/
B msg[16]; /*変数の宣言(最大メッセージサイズ)*/
............
ercd = rcv_mbf ( mbfid, (VP)msg ); /*メッセージの受信*/
if ( ercd == E_OK ) {
............ /*正常終了処理*/
} else if ( ercd == E_RLWAI ) {
............ /*強制終了処理*/
}
............
}
|
備考1
最大メッセージ・サイズは,
メッセージ・バッファの生成時に指定します。
msgの指す領域は,必ず最大メッセージ・サイズ以上としてください。
備考2 自タスクを対象メッセージ・バッファの送信待ちキューにキューイングする際のキューイング方式は,FIFO順に行われます。
備考3 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
-
prcv_mbf(ポーリング)
パラメータ
mbfidで指定されたメッセージ・バッファの状況に応じて,以下の処理を行います。
- メッセージ・バッファにメッセージが格納されている場合
メッセージ・バッファから最古のメッセージを取り出して
msgで指定された領域に格納し,そのメッセージサイズを戻り値として返します。このとき,対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ増加します。
さらに以下を,送信待ちキューにタスクがなくなるか,メッセージを格納できなくなるまで繰り返します。
- 送信待ちキューにタスクがキューイングされており,キュー先頭のタスクが指定したメッセージのサイズだけの空き領域がある場合は,そのメッセージをメッセージ・バッファに格納します。これにより,該当タスクは,送信待ちキューから外れ,WAITING状態(メッセージ送信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。また,このとき対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ減少します。
- メッセージ・バッファにメッセージが格納されておらず,送信待ちキューにタスクがキューイングされている場合
送信待ちキュー先頭のタスクが指定したメッセージを
msgで指定された領域に格納し,そのメッセージサイズを戻り値として返します。これにより,該当タスクは,送信待ちキューから外れ,WAITING状態(メッセージ送信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
なお,この状況は,メッセージ・バッファのサイズが0の場合のみ生じます。
- メッセージ・バッファにメッセージが格納されておらず,送信待ちキューにタスクがキューイングされていない場合
戻り値としてE_TMOUTを返します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考2参照*/
void Task1 ( VP_INT exinf ); /*備考2参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mbfid = 1; /*変数の宣言,初期化*/
B msg[16]; /*変数の宣言(最大メッセージサイズ)*/
............
ercd = prcv_mbf ( mbfid, (VP)msg ); /*メッセージの受信*/
if ( ercd == E_OK ) {
............ /*ポーリング成功処理*/
} else if ( ercd == E_TMOUT ) {
............ /*ポーリング失敗処理*/
}
............
}
|
備考1
最大メッセージ・サイズは,
メッセージ・バッファの生成時に指定します。
msgの指す領域は,必ず最大メッセージ・サイズ以上としてください。
備考2 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
-
trcv_mbf(タイムアウト付きで待つ)
パラメータ
mbfidで指定されたメッセージ・バッファの状況に応じて,以下の処理を行います。
- メッセージ・バッファにメッセージが格納されている場合
メッセージ・バッファから最古のメッセージを取り出して
msgで指定された領域に格納し,そのメッセージサイズを戻り値として返します。このとき,対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ増加します。
さらに以下を,送信待ちキューにタスクがなくなるか,メッセージを格納できなくなるまで繰り返します。
- 送信待ちキューにタスクがキューイングされており,キュー先頭のタスクが指定したメッセージのサイズだけの空き領域がある場合は,そのメッセージをメッセージ・バッファに格納します。これにより,該当タスクは,送信待ちキューから外れ,WAITING状態(メッセージ送信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。また,このとき対象メッセージ・バッファの空き領域は以下の式で算出されるサイズだけ減少します。
- メッセージ・バッファにメッセージが格納されておらず,送信待ちキューにタスクがキューイングされている場合
送信待ちキュー先頭のタスクが指定したメッセージを
msgで指定された領域に格納し,そのメッセージサイズを戻り値として返します。これにより,該当タスクは,送信待ちキューから外れ,WAITING状態(メッセージ送信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
なお,この状況は,メッセージ・バッファのサイズが0の場合のみ生じます。
- メッセージ・バッファにメッセージが格納されておらず,送信待ちキューにタスクがキューイングされていない場合
自タスクを対象メッセージ・バッファの受信待ちキューにキューイングしたのち,RUNNING状態からタイムアウト付きのWAITING状態(メッセージ受信待ち状態)へと遷移させます。
なお,メッセージ受信待ち状態の解除は,以下の場合に行われます。
|
|
|
snd_mbfの発行により,対象メッセージ・バッファにメッセージが送信された。
|
|
psnd_mbfの発行により,対象メッセージ・バッファにメッセージが送信された。
|
|
|
|
|
tsnd_mbfの発行により,対象メッセージ・バッファバッファにメッセージが送信された。
|
|
|
|
|
|
|
|
パラメータ tmoutで指定された待ち時間が経過した。
|
|
|
|
|
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考4参照*/
void Task1 ( VP_INT exinf ); /*備考4参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mbfid = 1; /*変数の宣言,初期化*/
B msg[16]; /*変数の宣言(最大メッセージサイズ)*/
TMO tmout = 3600; /*変数の宣言,初期化*/
............
/*メッセージの受信(タイムアウト付き)*/
ercd = trcv_mbf ( mbfid, (VP)msg, tmout );
if ( ercd == E_OK ) {
............ /*正常終了処理*/
} else if ( ercd == E_RLWAI ) {
............ /*強制終了処理*/
} else if ( ercd == E_TMOUT ) {
............ /*タイムアウト処理*/
}
............
}
|
備考1
最大メッセージ・サイズは,
メッセージ・バッファの生成時に指定します。
msgの指す領域は,必ず最大メッセージ・サイズ以上としてください。
備考2 自タスクを対象メッセージ・バッファの送信待ちキューにキューイングする際のキューイング方式は,FIFO順に行われます。
備考4 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
メッセージ・バッファ詳細情報の参照は,以下に示したサービス・コールを処理プログラムから発行することにより実現されます。
-
ref_mbf,
iref_mbf
パラメータ
mbfidで指定されたメッセージ・バッファの詳細情報(待ちタスクの有無,空き領域のサイズなど)をパラメータ
pk_rmbfで指定された領域に格納します。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考2参照*/
void Task1 ( VP_INT exinf ); /*備考2参照*/
void Task1 ( VP_INT exinf )
{
ID mbfid = 1; /*変数の宣言,初期化*/
T_RMBF pk_rmbf; /*データ構造体の宣言*/
ID stskid; /*変数の宣言*/
ID rtskid; /*変数の宣言*/
UINT smsgcnt; /*変数の宣言*/
SIZE fmbfsz; /*変数の宣言*/
............
............
ref_mbf ( mbfid, &pk_rmbf ); /*メッセージ・バッファ詳細情報の参照*/
stskid = pk_rmbf.stskid; /*メッセージ送信待ちタスクの有無の獲得*/
rtskid = pk_rmbf.rtskid; /*メッセージ受信待ちタスクの有無の獲得*/
smsgcnt = pk_rmbf.smsgcnt; /*未受信メッセージ総数の獲得*/
fmbfsz = pk_rmbf.fmbfsz; /*空き領域のサイズ */
............
............
}
|
備考2 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。