5.5 メールボックス
マルチタスク処理では,あるタスクの処理結果を他タスクに通知するといったタスク間の通信機能(メッセージの受け渡し機能)が必要となります。そこで,RI600V4では,共有されているメモリ領域に書き込まれたメッセージの先頭アドレス受け渡し機能として“メールボックス”を提供しています。
なお,メッセージは,メールボックスを介することにより任意の処理プログラムに対して送信することができますが,RI600V4における同期通信機能(メールボックス)では,メッセージの先頭アドレスを受信側処理プログラムに渡すだけであり,メッセージの内容が他領域にコピーされるわけではないので注意が必要です。
- TA_MFIFO属性のメールボックスを利用する場合
メッセージの先頭にはT_MSG構造体が必要です。この領域は,RI600V4が使用します。ユーザのメッセージは,T_MSG構造体以降に設定します。
ユーザのメッセージの長さについては,メールボックスを利用して情報のやり取りを行う処理プログラム間で規定することになります。
以下に,TA_MFIFO属性用メッセージを記述する場合の基本型を示します。
メッセージの先頭にはT_MSG構造体が必要です。この領域は,RI600V4が使用します。ユーザのメッセージは,T_MSG構造体以降に設定します。
ユーザのメッセージの長さについては,メールボックスを利用して情報のやり取りを行う処理プログラム間で規定することになります。
以下に,TA_MFIFO属性用メッセージを記述する場合の基本型を示します。
- TA_MPRI属性のメールボックスを利用する場合
メッセージの先頭にはT_MSG_PRI構造体が必要です。T_MSG_PRI.msgqueの領域は,RI600V4が使用します。T_MSG_PRI.msgpriには,メッセージの優先度を設定してください。ユーザのメッセージは,T_MSG_PRI構造体以降に設定します。
ユーザのメッセージの長さについては,メールボックスを利用して情報のやり取りを行う処理プログラム間で規定することになります
以下に,TA_MPRI属性用メッセージを記述する場合の基本型を示します。
メッセージの先頭にはT_MSG_PRI構造体が必要です。T_MSG_PRI.msgqueの領域は,RI600V4が使用します。T_MSG_PRI.msgpriには,メッセージの優先度を設定してください。ユーザのメッセージは,T_MSG_PRI構造体以降に設定します。
ユーザのメッセージの長さについては,メールボックスを利用して情報のやり取りを行う処理プログラム間で規定することになります
以下に,TA_MPRI属性用メッセージを記述する場合の基本型を示します。
備考2 メッセージの優先度として指定可能な値は,システム・コンフィギュレーション・ファイル作成時にメールボックス情報(mailbox[])の最大メッセージ優先度(max_pri)で定義された値域に限定されます。
- snd_mbx,isnd_mbx
パラメータmbxidで指定されたメールボックスにパラメータpk_msgで指定されたメッセージを送信します。
ただし,本サービス・コールを発行した際,対象メールボックスの待ちキューにタスクがキューイングされていた場合には,メッセージの送信(メッセージのキューイング処理)は行わず,該当タスクにメッセージを渡します。これにより,該当タスクは,待ちキューから外れ,WAITING状態(メッセージ受信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
以下に,本サービス・コールの記述例を示します。
パラメータmbxidで指定されたメールボックスにパラメータpk_msgで指定されたメッセージを送信します。
ただし,本サービス・コールを発行した際,対象メールボックスの待ちキューにタスクがキューイングされていた場合には,メッセージの送信(メッセージのキューイング処理)は行わず,該当タスクにメッセージを渡します。これにより,該当タスクは,待ちキューから外れ,WAITING状態(メッセージ受信待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/ #include "kernel_id.h" /*cfg600が出力するヘッダ・ファイルの定義*/ void task ( VP_INT exinf ) { ID mbxid = 1; /*変数の宣言,初期化*/ T_MSG_PRI *pk_msg; /*データ構造体の宣言*/ ............ ............ ............ /*メモリ領域(メッセージ用)を確保し,/ pk_msg = ... /*そのポインタをpk_msgに設定 */ ............ ............ /*本体(内容)の作成*/ ............ pk_msg->msgpri = 8; /* メッセージ優先度を設定*/ /*メッセージの送信*/ snd_mbx ( mbxid, ( T_MSG * ) pk_msg ); ............ ............ } |
- rcv_mbx(待つ)
パラメータmbxidで指定されたメールボックスからメッセージを受信し,その先頭アドレスをパラメータppk_msgで指定された領域に格納します。
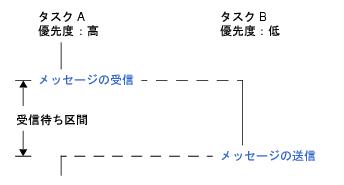
ただし,本サービス・コールを発行した際,対象メールボックスからメッセージを受信することができなかった(待ちキューにメッセージがキューイングされていなかった)場合には,メッセージの受信は行わず,自タスクを対象メールボックスの待ちキューにキューイングしたのち,RUNNING状態からWAITING状態(メッセージ受信待ち状態)へと遷移させます。
なお,メッセージ受信待ち状態の解除は,以下の場合に行われます。
パラメータmbxidで指定されたメールボックスからメッセージを受信し,その先頭アドレスをパラメータppk_msgで指定された領域に格納します。
ただし,本サービス・コールを発行した際,対象メールボックスからメッセージを受信することができなかった(待ちキューにメッセージがキューイングされていなかった)場合には,メッセージの受信は行わず,自タスクを対象メールボックスの待ちキューにキューイングしたのち,RUNNING状態からWAITING状態(メッセージ受信待ち状態)へと遷移させます。
なお,メッセージ受信待ち状態の解除は,以下の場合に行われます。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/ #include "kernel_id.h" /*cfg600が出力するヘッダ・ファイルの定義*/ void task ( VP_INT exinf ) { ER ercd; /*変数の宣言*/ ID mbxid = 1; /*変数の宣言,初期化*/ T_MSG *pk_msg; /*データ構造体の宣言*/ ............ ............ /*メッセージの受信*/ ercd = rcv_mbx ( mbxid, &pk_msg ); if ( ercd == E_OK ) { ............ /*正常終了処理*/ ............ } else if ( ercd == E_RLWAI ) { ............ /*強制終了処理*/ ............ } ............ } |
- prcv_mbx,iprcv_mbx(ポーリング)
パラメータmbxidで指定されたメールボックスからメッセージを受信し,その先頭アドレスをパラメータppk_msgで指定された領域に格納します。
ただし,本サービス・コールを発行した際,対象メールボックスからメッセージを受信することができなかった(待ちキューにメッセージがキューイングされていなかった)場合には,メッセージの受信は行わず,戻り値としてE_TMOUTを返します。
以下に,本サービス・コールの記述例を示します。
パラメータmbxidで指定されたメールボックスからメッセージを受信し,その先頭アドレスをパラメータppk_msgで指定された領域に格納します。
ただし,本サービス・コールを発行した際,対象メールボックスからメッセージを受信することができなかった(待ちキューにメッセージがキューイングされていなかった)場合には,メッセージの受信は行わず,戻り値としてE_TMOUTを返します。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/ #include "kernel_id.h" /*cfg600が出力するヘッダ・ファイルの定義*/ void task ( VP_INT exinf ) { ER ercd; /*変数の宣言*/ ID mbxid = 1; /*変数の宣言,初期化*/ T_MSG *pk_msg; /*データ構造体の宣言*/ ............ ............ /*メッセージの受信*/ ercd = prcv_mbx ( mbxid, &pk_msg ); if ( ercd == E_OK ) { ............ /*ポーリング成功処理*/ ............ } else if ( ercd == E_TMOUT ) { ............ /*ポーリング失敗処理*/ ............ } ............ ............ } |
- trcv_mbxタイムアウト付きで待つ)
パラメータmbxidで指定されたメールボックスからメッセージを受信し,その先頭アドレスをパラメータppk_msgで指定された領域に格納します。
ただし,本サービス・コールを発行した際,対象メールボックスからメッセージを受信することができなかった(待ちキューにメッセージがキューイングされていなかった)場合には,メッセージの受信は行わず,自タスクを対象メールボックスの待ちキューにキューイングしたのち,RUNNING状態からタイムアウト付きのWAITING状態(メッセージ受信待ち状態)へと遷移させます。
なお,メッセージ受信待ち状態の解除は,以下の場合に行われます。
パラメータmbxidで指定されたメールボックスからメッセージを受信し,その先頭アドレスをパラメータppk_msgで指定された領域に格納します。
ただし,本サービス・コールを発行した際,対象メールボックスからメッセージを受信することができなかった(待ちキューにメッセージがキューイングされていなかった)場合には,メッセージの受信は行わず,自タスクを対象メールボックスの待ちキューにキューイングしたのち,RUNNING状態からタイムアウト付きのWAITING状態(メッセージ受信待ち状態)へと遷移させます。
なお,メッセージ受信待ち状態の解除は,以下の場合に行われます。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/ #include "kernel_id.h" /*cfg600が出力するヘッダ・ファイルの定義*/ void task ( VP_INT exinf ) { ER ercd; /*変数の宣言*/ ID mbxid = 1; /*変数の宣言,初期化*/ T_MSG *pk_msg; /*データ構造体の宣言*/ TMO tmout = 3600; /*変数の宣言,初期化*/ ............ /*メッセージの受信*/ ercd = trcv_mbx ( mbxid, &pk_msg, tmout ); if ( ercd == E_OK ) { ............ /*正常終了処理*/ } else if ( ercd == E_RLWAI ) { ............ /*強制終了処理*/ ............ } else if ( ercd == E_TMOUT ) { ............ /*タイムアウト処理*/ } ............ } |
- ref_mbx,iref_mbx
パラメータmbxidで指定されたメールボックスのメールボックス詳細情報(待ちタスクの有無,待ちメッセージの有無)をパラメータpk_rmbxで指定された領域に格納します。
以下に,本サービス・コールの記述例を示します。
パラメータmbxidで指定されたメールボックスのメールボックス詳細情報(待ちタスクの有無,待ちメッセージの有無)をパラメータpk_rmbxで指定された領域に格納します。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/ #include "kernel_id.h" /*cfg600が出力するヘッダ・ファイルの定義*/ void task ( VP_INT exinf ) { ID mbxid = 1; /*変数の宣言,初期化*/ T_RMBX pk_rmbx; /*データ構造体の宣言*/ ID wtskid; /*変数の宣言*/ T_MSG *pk_msg; /*データ構造体の宣言*/ ............ ............ ref_mbx ( mbxid, &pk_rmbx ); /*メールボックス詳細情報の参照*/ wtskid = pk_rmbx.wtskid; /*待ちタスクの有無の獲得*/ pk_msg = pk_rmbx.pk_msg; /*待ちメッセージの有無の獲得*/ ............ ............ } |