第5章 同期通信機能
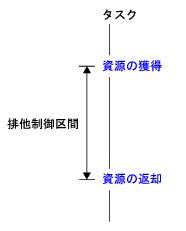
RI78V4では,並行に動作するタスクが限られた数の資源(ハードウエア・デバイス,ライブラリ関数など)を同時に利用するといった資源使用の競合を防ぐ手段(排他制御機能)として“非負数の計数型セマフォ”を提供しています。
- 静的な生成
セマフォの静的な生成は,システム・コンフィギュレーション・ファイルにセマフォ情報を定義することにより実現されます。
RI78V4では,カーネル初期化部において,情報ファイルに格納されているデータをもとにセマフォの生成処理を実行し,管理対象とします。
セマフォの静的な生成は,システム・コンフィギュレーション・ファイルにセマフォ情報を定義することにより実現されます。
RI78V4では,カーネル初期化部において,情報ファイルに格納されているデータをもとにセマフォの生成処理を実行し,管理対象とします。
- sig_sem,isig_sem
パラメータsemidで指定されたセマフォに資源を返却(セマフォ・カウンタに0x1を加算)します。
ただし,本サービス・コールを発行した際,対象セマフォの待ちキューにタスクがキューイングされていた場合には,カウンタ操作処理は実行されず,該当タスク(待ちキューの先頭タスク)に資源が渡されます。
これにより,該当タスクは,待ちキューから外れ,WAITING状態(資源待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
以下に,本サービス・コールの記述例を示します。
パラメータsemidで指定されたセマフォに資源を返却(セマフォ・カウンタに0x1を加算)します。
ただし,本サービス・コールを発行した際,対象セマフォの待ちキューにタスクがキューイングされていた場合には,カウンタ操作処理は実行されず,該当タスク(待ちキューの先頭タスク)に資源が渡されます。
これにより,該当タスクは,待ちキューから外れ,WAITING状態(資源待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。
以下に,本サービス・コールの記述例を示します。
#include <kernel.h> /*標準ヘッダ・ファイルの定義*/ #include <kernel_id.h> /*システム情報ヘッダ・ファイルの定義*/ void func_task ( VP_INT exinf ) { ID semid = ID_semA; /*変数の宣言,初期化*/ ............ ............ sig_sem ( semid ); /*資源の返却*/ ............ ............ } |
備考2 RI78V4が管理しているセマフォ・カウンタは,7ビット幅で構成されています。このため,本サービス・コールの発行により,資源数が最大カウント値127を越える場合には,カウンタ操作処理は実行されず,戻り値とし“てE_QOVR”が返されます。
- wai_sem
パラメータsemidで指定されたセマフォから資源を獲得(セマフォ・カウンタから0x1を減算)します。
ただし,本サービス・コールを発行した際,対象セマフォから資源を獲得することができなかった(セマフォ・カウンタが0x0であった)場合には,カウンタ操作処理は実行されず,自タスクを対象セマフォの待ちキューに資源の獲得要求順(FIFO順)でキューイングします。
これにより,自タスクは,レディ・キューから外れ,RUNNING状態からWAITING状態(資源待ち状態)へと遷移します。
なお,資源待ち状態の解除は,以下の場合に行われ,資源待ち状態からREADY状態へと遷移します。
パラメータsemidで指定されたセマフォから資源を獲得(セマフォ・カウンタから0x1を減算)します。
ただし,本サービス・コールを発行した際,対象セマフォから資源を獲得することができなかった(セマフォ・カウンタが0x0であった)場合には,カウンタ操作処理は実行されず,自タスクを対象セマフォの待ちキューに資源の獲得要求順(FIFO順)でキューイングします。
これにより,自タスクは,レディ・キューから外れ,RUNNING状態からWAITING状態(資源待ち状態)へと遷移します。
なお,資源待ち状態の解除は,以下の場合に行われ,資源待ち状態からREADY状態へと遷移します。
#include <kernel.h> /*標準ヘッダ・ファイルの定義*/ #include <kernel_id.h> /*システム情報ヘッダ・ファイルの定義*/ void func_task ( VP_INT exinf ) { ER ercd; /*変数の宣言*/ ID semid = ID_semA; /*変数の宣言,初期化*/ ............ ............ ercd = wai_sem ( semid ); /*資源の獲得(永久待ち)*/ if ( ercd == E_OK ) { ............ /*正常終了処理*/ ............ } else if ( ercd == E_RLWAI ) { ............ /*強制終了処理*/ ............ } ............ ............ } |
- pol_sem
パラメータsemidで指定されたセマフォから資源を獲得(セマフォ・カウンタから0x1を減算)します。
ただし,本サービス・コールを発行した際,対象セマフォから資源を獲得することができなかった(セマフォ・カウンタが0x0であった)場合には,カウンタ操作処理は実行されず,戻り値として“E_TMOUT”が返されます。
以下に,本サービス・コールの記述例を示します。
パラメータsemidで指定されたセマフォから資源を獲得(セマフォ・カウンタから0x1を減算)します。
ただし,本サービス・コールを発行した際,対象セマフォから資源を獲得することができなかった(セマフォ・カウンタが0x0であった)場合には,カウンタ操作処理は実行されず,戻り値として“E_TMOUT”が返されます。
以下に,本サービス・コールの記述例を示します。
#include <kernel.h> /*標準ヘッダ・ファイルの定義*/ #include <kernel_id.h> /*システム情報ヘッダ・ファイルの定義*/ void func_task ( VP_INT exinf ) { ER ercd; /*変数の宣言*/ ID semid = ID_semA; /*変数の宣言,初期化*/ ............ ............ ercd = pol_sem ( semid ); /*資源の獲得(ポーリング)*/ if ( ercd == E_OK ) { ............ /*ポーリング成功処理*/ ............ } else if ( ercd == E_TMOUT ) { ............ /*ポーリング失敗処理*/ ............ } ............ ............ } |
- twai_sem
パラメータsemidで指定されたセマフォから資源を獲得(セマフォ・カウンタから0x1を減算)します。
ただし,本サービス・コールを発行した際,対象セマフォから資源を獲得することができなかった(セマフォ・カウンタが0x0であった)場合には,カウンタ操作処理は実行されず,自タスクを対象セマフォの待ちキューに資源の獲得要求順(FIFO順)でキューイングします。
これにより,自タスクは,レディ・キューから外れ,RUNNING状態からWAITING状態(資源待ち状態)へと遷移します。
なお,資源待ち状態の解除は,以下の場合に行われ,資源待ち状態からREADY状態へと遷移します。
パラメータsemidで指定されたセマフォから資源を獲得(セマフォ・カウンタから0x1を減算)します。
ただし,本サービス・コールを発行した際,対象セマフォから資源を獲得することができなかった(セマフォ・カウンタが0x0であった)場合には,カウンタ操作処理は実行されず,自タスクを対象セマフォの待ちキューに資源の獲得要求順(FIFO順)でキューイングします。
これにより,自タスクは,レディ・キューから外れ,RUNNING状態からWAITING状態(資源待ち状態)へと遷移します。
なお,資源待ち状態の解除は,以下の場合に行われ,資源待ち状態からREADY状態へと遷移します。
#include <kernel.h> /*標準ヘッダ・ファイルの定義*/ #include <kernel_id.h> /*システム情報ヘッダ・ファイルの定義*/ void func_task ( VP_INT exinf ) { ER ercd; /*変数の宣言*/ ID semid = ID_semA; /*変数の宣言,初期化*/ TMO tmout = 3600; /*変数の宣言,初期化*/ ............ ............ /*資源の獲得(タイムアウト付き)*/ ercd = twai_sem ( semid, tmout ); if ( ercd == E_OK ) { ............ /*正常終了処理*/ ............ } else if ( ercd == E_RLWAI ) { ............ /*強制終了処理*/ ............ } else if ( ercd == E_TMOUT ) { ............ /*タイムアウト処理*/ ............ } ............ ............ } |
- ref_sem
パラメータsemidで指定されたセマフォのセマフォ状態情報(待ちタスクの有無など)をパラメータpk_rsemで指定された領域に格納します。
以下に,本サービス・コールの記述例を示します。
パラメータsemidで指定されたセマフォのセマフォ状態情報(待ちタスクの有無など)をパラメータpk_rsemで指定された領域に格納します。
以下に,本サービス・コールの記述例を示します。
#include <kernel.h> /*標準ヘッダ・ファイルの定義*/ #include <kernel_id.h> /*システム情報ヘッダ・ファイルの定義*/ void func_task ( VP_INT exinf ) { ID semid = ID_semA; /*変数の宣言,初期化*/ T_RSEM pk_rsem; /*データ構造体の宣言*/ ID wtskid; /*変数の宣言*/ UINT semcnt; /*変数の宣言*/ ............ ............ ref_sem ( semid, &pk_rsem ); /*セマフォの状態参照*/ wtskid = pk_rsem.wtskid; /*待ちタスクの有無の獲得*/ semcnt = pk_rsem.semcnt; /*現在資源数の獲得*/ ............ ............ } |