第8章 拡張同期通信機能
本章では,RI600PXが提供している拡張同期通信機能について解説しています。
RI600PXにおける拡張同期通信機能では,タスク間の排他制御を実現する手段として
ミューテックス, 任意のサイズのメッセージをコピーして受け渡す手段として
メッセージ・バッファを提供しています。
マルチタスク処理では,並行に動作するタスクが限られた数の資源(A/Dコンバータ,コプロセッサ,ファイルなど)を同時に使用するといった資源使用の競合を防ぐ機能(排他制御機能)が必要となります。そこで,RI600PXでは,このような資源使用の競合を防ぐ機能として“ミューテックス”を提供しています。
以下に,ミューテックスを利用した場合の処理の流れを示します。
RI600PXのミューテックスは優先度上限プロトコルをサポートしています。
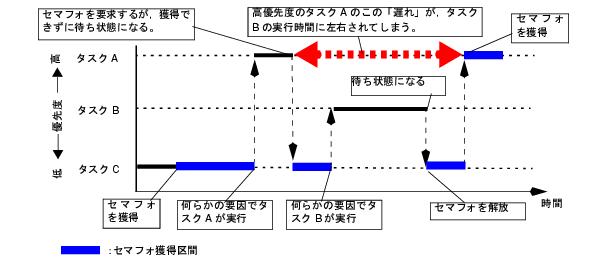
セマフォを用いた排他制御では,優先度逆転という問題が発生するケースがあります。優先度逆転とは,資源を要求するタスクの実行が,資源を使用しない別のタスクによって遅延されてしまうという現象です。
この様子を
図8−2に示します。この図では,タスクA とタスクC は同じ資源を使用し,タスクB はその資源を使用しない例になっています。タスクA は資源を使用するためにセマフォを獲得しようとしますが,すでにタスクC がセマフォを獲得しているので待ち状態になります。ところが,タスクCがセマフォを解放する前に,優先度がタスクC よりも高くてタスクA より低く,かつ資源とは関係のないタスクB が実行すると,タスクC によるセマフォの解放はタスクB の実行によって遅れ,その結果タスクA がセマフォを獲得するのも遅れます。タスクA の立場では,資源競合しておらず,かつ自分より優先度の低いタスクB が優先的に実行されてしまうことになります。
ミューテックスは,この問題を回避するために導入された機能です。
タスクの優先度には,ベース優先度と現在優先度があります。タスクのスケジューリングは,現在優先度に従って行われます。
ミューテックスをロックしていない時は,両者は常に同じです。
ミューテックスをロックすると,現在優先度のみがそのミューテックスの上限優先度に引き上げられます。
タスクの優先度を変更する
chg_pri,
ichg_priでは,ミューテックスをロックしていないタスクの場合は,ベース優先度・現在優先度とも変更されますが,ミューテックスをロックしているタスクの場合はベース優先度のみが変更されます。また,ミューテックスロック中,またはミューテックスのロックを待っているタスクの場合は,ロック中,またはロックを待っているミューテックスのいずれかの上限優先度よりも高い優先度を指定すると,戻り値としてE_ILUSEを返します。
優先度上限プロトコルの本来の振る舞いは,タスクの現在優先度を,そのタスクがロックしているミューテックスの中で最高の上限優先度に制御することです。これは,ミューテックスのロック・アンロック時に,タスクの現在優先度を以下のように制御することで実現されます。
- ミューテックスのロック時に,タスクの現在優先度をそのタスクがロックしているミューテックスの中で最高の上限優先度に変更する。
- ミューテックスのアンロック時に,
タスクの現在優先度をそのタスクが以降もロックを継続するミューテックスの中で最高の上限優先度に変更する。ロックしているミューテックスがなくなる場合は,現在優先度をベース優先度に戻す。
しかし,RI600PXではオーバーヘッドの低減を目的に「簡略化した優先度上限プロトコル」を採用しているため,上記の下線部の制御は行われません。
ミューテックスは最大資源数が1つのセマフォ(バイナリ・セマフォ)と似た動作をしますが,以下のような違いがあります。
- ミューテックスをロックしたタスクの現在優先度は,ミューテックスのロックを解除するまで,ミューテックスの上限優先度に引き上げられます。これによって,優先度逆転問題が回避されます。
- ミューテックスのロック解除(資源返却に相当)できるのはミューテックスをロックしたタスクのみです。
→ セマフォはどのタスク/ハンドラからでも資源の返却が可能です。
- ミューテックスをロックしているタスクを終了する(
ext_tsk,
ter_tsk)際に,自動的にロック解除処理が行われます。
→ セマフォは自動的に資源の返却を行わないので,資源を獲得したまま終了します。
- セマフォは複数の資源を管理できる(最大資源数を指定できる)がミューテックスの資源最大数に相当する値は1固定です。
ミューテックスは,以下のいずれかの方法で生成します。
1 ) システム・コンフィギュレーション・ファイルによる生成
システム・コンフィギュレーション・ファイルで静的API“mutex[]”を使用してミューテックスを生成します。
静的API“mutex[]”の詳細は,「
20.15 ミューテックス情報(mutex[])」を参照してください。
2 )
cre_mtxまたは
acre_mtxサービスコールによる生成
cre_mtxは,パラメータ
pk_cmtxが指す領域に設定されたミューテックス生成情報にしたがって,パラメータ
mtxidで指定されたミューテックスIDのタスクを生成します。
acre_mtxは,パラメータ
pk_cmtxが指す領域に設定されたミューテックス生成情報にしたがってミューテックス生成し,生成されたミューテックスIDを返します。
指定するミューテックス生成情報は,以下の通りです。
- ミューテックス属性(
mtxatr)
「優先度上限プロトコル(TA_CEILING)」のみを指定できます。
なお,タスク待ちキューは,タスクの現在優先度順で管理されます。
以下に,代表としてacre_mtxの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考参照*/
void Task1 ( VP_INT exinf ); /*備考参照*/
void Task1 ( VP_INT exinf )
{
ID mtxid; /*変数の宣言*/
T_CMTX pk_cmtx = { /*変数の宣言,初期化*/
TA_CEILING, /*ミューテックス属性(mtxatr)*/
1 /*上限優先度(ceilpri)*/
};
............
............
mtxid = acre_mtx ( &pk_cmtx ); /*ミューテックスの生成*/
............
............
}
|
備考 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
-
del_mtx
パラメータ
mtxidで指定されたミューテックスを削除します。
対象ミューテックスをロックしているタスクがある場合,そのロックを解除します。その結果,そのタスクがロックしているミューテックスがなくなった場合には,そのタスクの現在優先度をベース優先度に戻します。対象ミューテックスをロックしていたタスクには,ミューテックスが削除されたことは通知されません。後で
unl_mtxによってミューテックスをロック解除しようとした時点で,エラーE_NOEXS が返されます。
対象ミューテックスで
loc_mtxまたは
tloc_mtxによって待っているタスクがある場合は,そのタスク待ち状態を解除し,
loc_mtxまたは
tloc_mtxの戻り値としてE_DLTを返します。
本サービス・コールは,
信頼されたドメインに所属するタスクだけが呼び出せます。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考参照*/
void Task1 ( VP_INT exinf ); /*備考参照*/
void Task1 ( VP_INT exinf )
{
ID mtxid = 8; /*変数の宣言,初期化*/
............
............
del_mtx( mtxid ); /*ミューテックスの削除*/
}
|
備考 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
8.2.7 ミューテックスのロック
ミューテックスのロックは,以下に示したサービス・コールを処理プログラムから発行することにより実現されます。
-
loc_mtx(待つ)
パラメータ
mtxidで指定されたミューテックスをロックします。
ただし,本サービス・コールを発行した際,対象ミューテックスをロックすることができなかった(すでに他タスクがロックしていた)場合には,自タスクを対象ミューテックスの待ちキューにキューイングしたのち,RUNNING状態からWAITING状態(ミューテックス待ち状態)へと遷移させます。
なお,ミューテックス待ち状態の解除は,以下の場合に行われます。
|
|
|
unl_mtxの発行により,対象ミューテックスのロック状態が解除された。
|
|
ext_tskの発行により,対象ミューテックスのロック状態が解除された。
|
|
exd_tskの発行により,対象ミューテックスのロック状態が解除された。
|
|
ter_tskの発行により,対象ミューテックスのロック状態が解除された。
|
|
|
|
|
|
|
|
|
|
|
ミューテックスのロック時には,自タスクの現在優先度を対象ミューテックスの上限優先度に変更します。ただし,自タスクがすでに他のミューテックスをロックしており,かつ対象ミューテックスの上限優先度がロック済みのミューテックスの上限優先度以下の場合は,自タスクの現在優先度は変更しません。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考3参照*/
void Task1 ( VP_INT exinf ); /*備考3参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mtxid = 8; /*変数の宣言,初期化*/
............
............
ercd = loc_mtx ( mtxid ); /*ミューテックスのロック*/
if ( ercd == E_OK ) {
............ /*ロック状態*/
............
unl_mtx ( mtxid ); /*ミューテックスのロック解除*/
} else if ( ercd == E_RLWAI ) {
............ /*強制終了処理*/
............
}
............
............
}
|
備考1 自タスクを対象ミューテックスの待ちキューにキューイングする際のキューイング方式は,優先度順に行われます。ただし,同じ優先度のタスクの中ではFIFO順に行われます。
備考2 自タスクがロックしているミューテックスに対して本サービス・コールを再発行(ミューテックスの多重ロック)した際には,戻り値としてE_ILUSEを返します。
備考3 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
-
ploc_mtx(ポーリング)
パラメータ
mtxidで指定されたミューテックスをロックします。
ただし,本サービス・コールを発行した際,対象ミューテックスをロックすることができなかった(すでに他タスクがロックしていた)場合には,戻り値としてE_TMOUTを返します。
ミューテックスのロック時には,自タスクの現在優先度を対象ミューテックスの上限優先度に変更します。ただし,自タスクがすでに他のミューテックスをロックしており,かつ対象ミューテックスの上限優先度がロック済みのミューテックスの上限優先度以下の場合は,自タスクの現在優先度は変更しません。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考2参照*/
void Task1 ( VP_INT exinf ); /*備考2参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mtxid = 8; /*変数の宣言,初期化*/
............
............
ercd = ploc_mtx ( mtxid ); /*ミューテックスのロック*/
if ( ercd == E_OK ) {
............ /*ポーリング成功処理*/
............
unl_mtx ( mtxid ); /*ミューテックスのロック解除*/
} else if ( ercd == E_TMOUT ) {
............ /*ポーリング失敗処理*/
............
}
............
............
}
|
備考1 自タスクがロックしているミューテックスに対して本サービス・コールを再発行(ミューテックスの多重ロック)した際には,戻り値としてE_ILUSEを返します。
備考2 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
-
tloc_mtx(タイムアウト付きで待つ)
パラメータ
mtxidで指定されたミューテックスをロックします。
ただし,本サービス・コールを発行した際,対象ミューテックスをロックすることができなかった(すでに他タスクがロックしていた)場合には,自タスクを対象ミューテックスの待ちキューにキューイングしたのち,RUNNING状態からタイムアウト付きのWAITING状態(ミューテックス待ち状態)へと遷移させます。
なお,ミューテックス待ち状態の解除は,以下の場合に行われます。
|
|
|
unl_mtxの発行により,対象ミューテックスのロック状態が解除された。
|
|
ext_tskの発行により,対象ミューテックスのロック状態が解除された。
|
|
exd_tskの発行により,対象ミューテックスのロック状態が解除された。
|
|
ter_tskの発行により,対象ミューテックスのロック状態が解除された。
|
|
|
|
|
|
|
|
パラメータ tmoutで指定された待ち時間が経過した。
|
|
|
|
|
ミューテックスのロック時には,自タスクの現在優先度を対象ミューテックスの上限優先度に変更します。ただし,自タスクがすでに他のミューテックスをロックしており,かつ対象ミューテックスの上限優先度がロック済みのミューテックスの上限優先度以下の場合は,自タスクの現在優先度は変更しません。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考4参照*/
void Task1 ( VP_INT exinf ); /*備考4参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mtxid = 8; /*変数の宣言,初期化*/
TMO tmout = 3600; /*変数の宣言,初期化*/
............
ercd = tloc_mtx ( mtxid, tmout ); /*ミューテックスのロック*/
if ( ercd == E_OK ) {
............ /*ロック状態*/
unl_mtx ( mtxid ); /*ミューテックスのロック解除*/
} else if ( ercd == E_RLWAI ) {
............ /*強制終了処理*/
} else if ( ercd == E_TMOUT ) {
............ /*タイムアウト処理*/
}
}
|
備考1 自タスクを対象ミューテックスの待ちキューにキューイングする際のキューイング方式は,優先度順に行われます。ただし,同じ優先度のタスクの中ではFIFO順に行われます。
備考2 自タスクがロックしているミューテックスに対して本サービス・コールを再発行(ミューテックスの多重ロック)した際には,戻り値としてE_ILUSEを返します。
備考4 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
ミューテックスのロック解除は,以下に示したサービス・コールを処理プログラムから発行することにより実現されます。
-
unl_mtx
パラメータ
mtxidで指定されたミューテックスのロック状態を解除します。その結果,自タスクがロックしているミューテックスがなくなった場合には,自タスクの現在優先度をベース優先度に変更します。
本サービス・コールを発行した際,対象ミューテックスの待ちキューにタスクがキューイングされていた場合には,ミューテックスのロック解除処理後,ただちに該当タスク(待ちキューの先頭タスク)によるミューテックスのロック処理が行われます。このとき,該当タスクは,待ちキューから外れ,WAITING状態(ミューテックス待ち状態)からREADY状態へ,またはWAITING-SUSPENDED状態からSUSPENDED状態へと遷移します。また,該当タスクの現在優先度を対象ミューテックスの上限優先度に変更します。ただし,該当タスクがすでに他のミューテックスをロックしており,かつ対象ミューテックスの上限優先度がロック済みのミューテックスの上限優先度以下の場合は,該当タスクの現在優先度は変更しません。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考3参照*/
void Task1 ( VP_INT exinf ); /*備考3参照*/
void Task1 ( VP_INT exinf )
{
ER ercd; /*変数の宣言*/
ID mtxid = 8; /*変数の宣言,初期化*/
............
............
ercd = loc_mtx ( mtxid ); /*ミューテックスのロック*/
if ( ercd == E_OK ) {
............ /*ロック状態*/
............
unl_mtx ( mtxid ); /*ミューテックスのロック解除*/
} else if ( ercd == E_RLWAI ) {
............ /*強制終了処理*/
............
}
............
............
}
|
備考1 ミューテックスのロック解除が可能なタスクは“対象ミューテックスをロックしたタスク”に限られます。このため,自タスクがロックしていないミューテックスに対して本サービス・コールを発行した場合には,何も処理は行わず,戻り値としてE_ILUSEを返します。
備考2 タスクの終了時,そのタスクがロックしていたミューテックスは解除されます。
備考3 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。
ミューテックス詳細情報の参照は,以下に示したサービス・コールを処理プログラムから発行することにより実現されます。
-
ref_mtx
パラメータ
mtxidで指定されたミューテックスのミューテックス詳細情報(ロックの有無,待ちタスクの有無)をパラメータ
pk_rmtxで指定された領域に格納します。
以下に,本サービス・コールの記述例を示します。
#include "kernel.h" /*標準ヘッダ・ファイルの定義*/
#include "kernel_id.h" /*cfg600pxが出力するヘッダ・ファイルの定義*/
#pragma task Task1 /*備考2参照*/
void Task1 ( VP_INT exinf ); /*備考2参照*/
void Task1 ( VP_INT exinf )
{
ID mtxid = 1; /*変数の宣言,初期化*/
T_RMTX pk_rmtx; /*データ構造体の宣言*/
ID htskid; /*変数の宣言*/
ID wtskid; /*変数の宣言*/
............
............
ref_mtx ( mtxid, &pk_rmtx ); /*ミューテックス詳細情報の参照*/
htskid = pk_rmtx.htskid; /*ロックの有無の獲得*/
wtskid = pk_rmtx.wtskid; /*待ちタスクの有無の獲得*/
............
............
}
|
備考2 システム・コンフィギュレーション・ファイルで生成したタスクについては,これらのステートメントはcfg600pxがkernel_id.hに出力するため,記述不要です。